Appliquer : Voiture autonome en 5ème.
Problème à résoudre : Comment assurer les fonctions de base de la voiture sans conducteur ?
Compétences Traités :
- Analyser le comportement attendu d’un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande.
- Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs.
- Ecrire, mettre au point (tester, corriger) et exécuter un programme en réponse à un problème donné [commandant un système réel et vérifier le comportement attendu].
Connaissances :
»Notions d’algorithme et de programme.
»Déclenchement d’une action par un évènement, séquences d’instructions, boucles, instructions conditionnelles.
»Capteur, actionneur, interface.
|
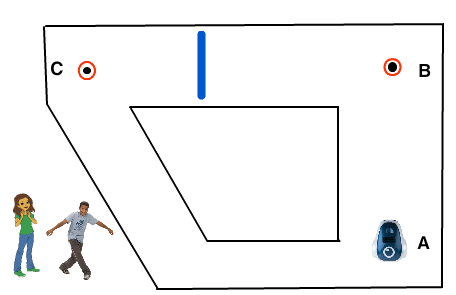
Comment mettre en marche arrêter le robot ? Comment se déplacer avec précision ? Comment tourner ? |
|
|
 |
|
- 1- Circuler en ville . |
|
|
|
|
|
|
|
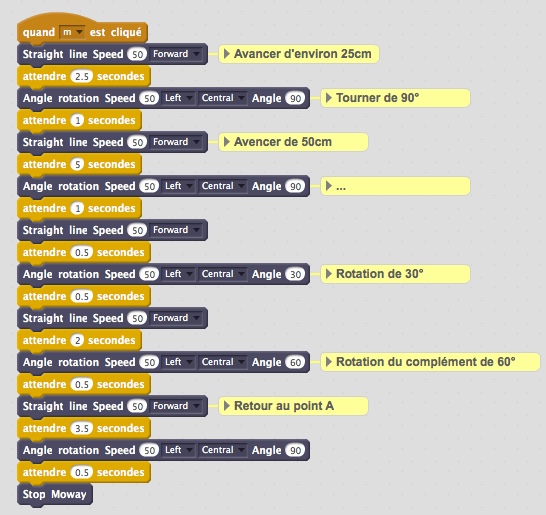
Gestion simplifiée des déplacements de base du robot Moway avec Scratch2 :
|
|
|
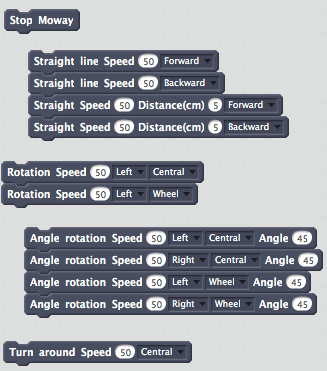
Aide mémoire des commandes du robot Moway.
|
|