5. Suivre une ligne
5.1 Présentation et test

Nous allons maintenant programmer le robot en utilisant les capteurs "suiveurs de ligne".
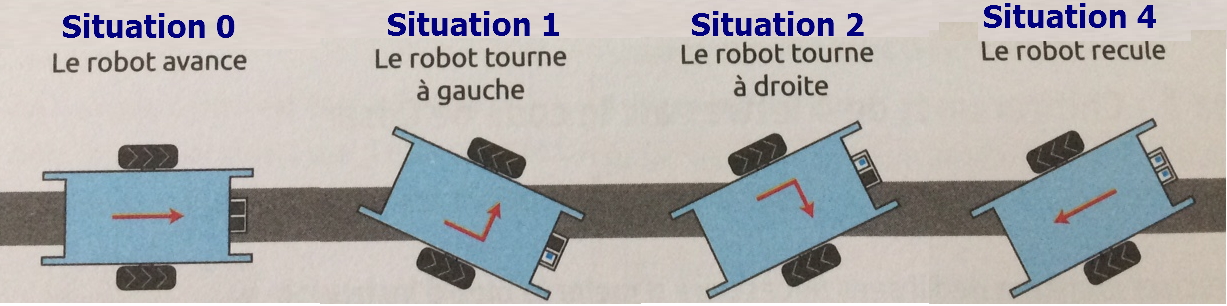
Le robot se déplace en suivant un marquage au sol (ligne noire). Pour assurer cette fonction, il dispose à l'avant d'un module suiveur de ligne, composé de deux capteurs optiques.
Tant que les deux capteurs détectent la ligne, le robot avance (situation 0). Lorsqu'un des deux capteurs ne détecte plus la ligne, le robot doit tourner sur lui même pour se remettre dans l'axe (situation 1 ou 2).
Si deux capteurs sont en dehors de la ligne, le robot recule (situation 4).
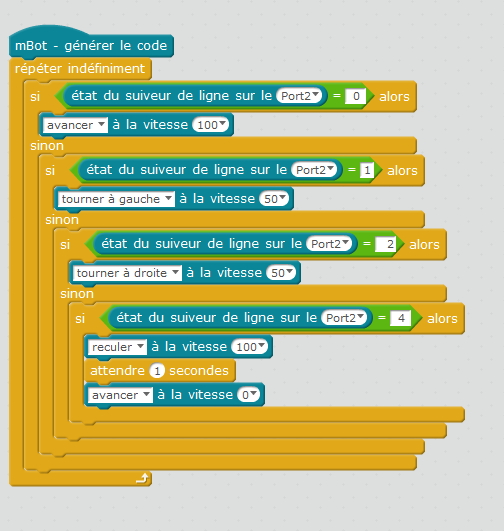
Recopiez le programme suivant, et implantez le dans le robot avec le câble.
Posez le robot sur la feuille fournie et notez sur votre cahier (et sur votre fichier) vos observations.
- Dans quels cas peut on utiliser un robot suiveur de ligne?
- Filmez votre résultat
5.2 Analyse et amélioration
Posez votre robot sur le plateau fourni par le professeur.
- Le robot fini t'il le circuit ? Pourquoi ?
Pouvez vous proposer une solution pour que le robot se déplace juqu'au bout du circuit ?
- Notez vos réflexions et appelez le professeur pour vérifier votre travail.
- Créez un programme pour que le robot finisse son trajet
- Filmez votre résultat