Appliquer
 |
- Appliquer - |
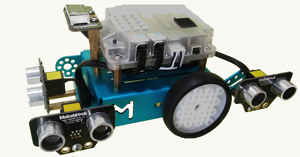
Capteur ultrason sur servomoteur.
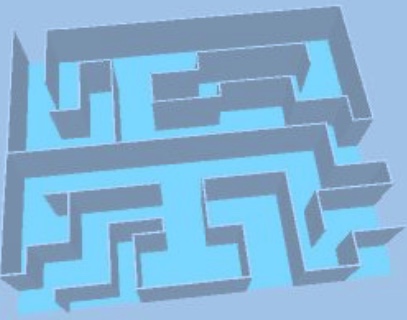
Mbot dans un labyrinthe avec deux capteurs à ultrasons supplémentaires et d'un afficheur 7 segments 3ème). |
|
- Appliquer - |
Capteur ultrason sur servomoteur.
Mbot dans un labyrinthe avec deux capteurs à ultrasons supplémentaires et d'un afficheur 7 segments 3ème). |