6. Capteur ultrason
6.1 Présentation et test
Nous allons maintenant programmer le robot en utilisant les capteurs "ultrason".
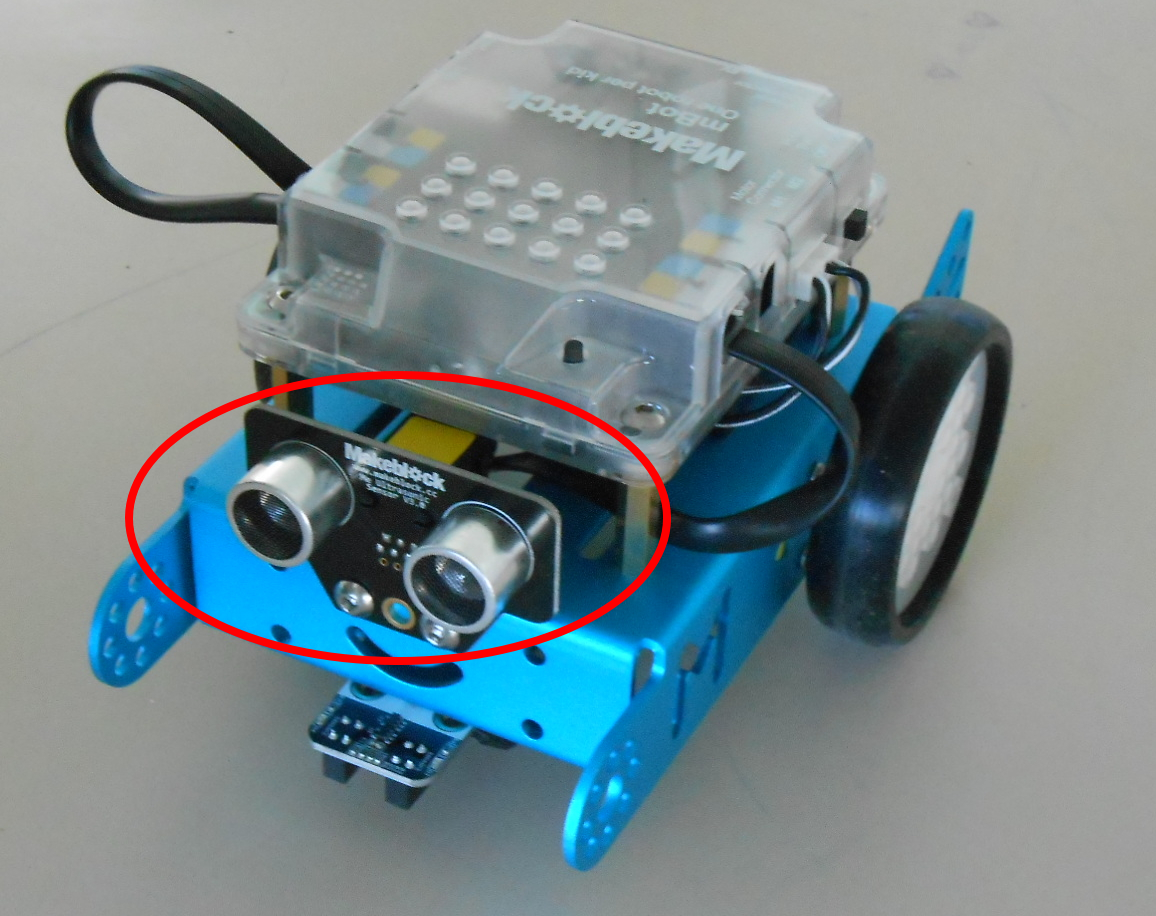
Le robot se déplace en détectant les obstacles. Pour assurer cette fonction, il dispose à l'avant d'un capteur à ultrason qui renvoie la distance qui le sépare d'un obstacle (en centimètres). La distance de détection est comprise entre 3 cm et 400 cm.
Recopiez le programme suivant et chargez le dans le robot :
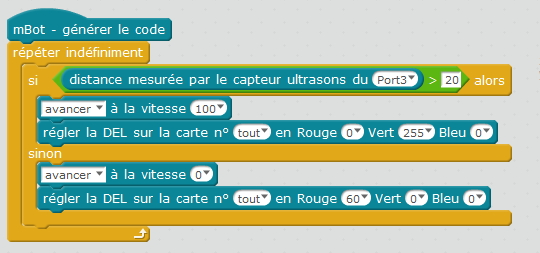
- Posez le robot sur le sol, notez vos observations sur le cahier et sur votre fichier.
6.2 Analyse et amélioration
Posez votre robot dans le labyrinthe.
- Le robot fini t'il le circuit ? Pourquoi ?
Pouvez vous proposer une solution pour que le robot arrive à la sortie du labyrinthe?
- Notez vos réflexions et appelez le professeur pour vérifier votre travail.
- Créez un programme pour que le robot sorte du labyrinthe
- Filmez votre résultat.