Codage - S'arrêter devant un obstacle
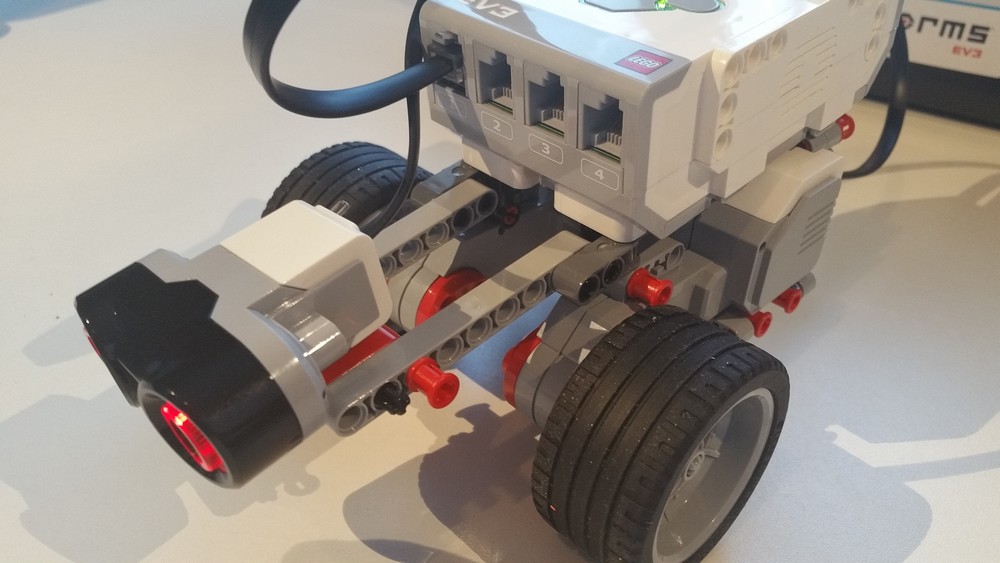
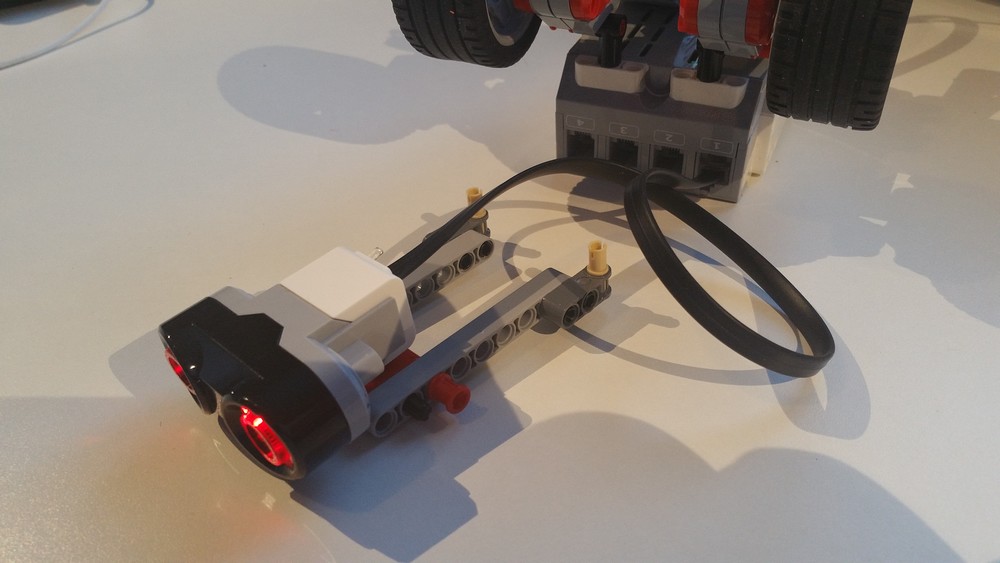
Codage - S'arrêter devant un obstacle - Capteur infrarouge
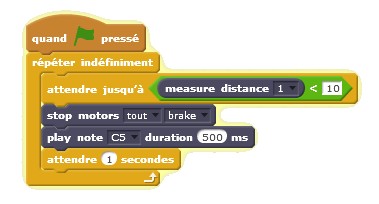
Algorithme pour s'arrêter devant un obstacle avec le capteur infrarouge :
Le robot doit pouvoir s'arrêter devant un obstacle et bipper lorsqu'il détecte une distance minimale avec le capteur infrarouge :
|
Algorithme à partir de Scratchx :
|
|
S'arrêter devant un obstacle avec le capteur infrarouge en vidéo
Codage - S'arrêter devant un obstacle - Capteur tactile
Algorithme pour s'arrêter devant un obstacle avec le capteur tactile :
Le robot doit s'arrêter devant un obstacle et bipper lorsqu'il touche avec le capteur tactile :
|
Algorithme à partir de Scratchx :
|
|



S'arrêter devant un obstacle avec le capteur tactile en vidéo