Exemple de projet 3ème "Robot d'exploration de Mars"
Le projet "Robot d'exploration de Mars"
Le projet "Exploration de Mars" est à destination des 3ème et permet de travailler toutes les compétences du CYCLE 4.

Cliquer sur l'image pour agrandir
Le projet consisterait à imaginer et réaliser un prototype de robot multifonctions grâce à ses capteurs et actionneurs pour participer à l'exploration de Mars.
Un cahier des charges préciserait les détails des missions à accomplir pour la conception du robot et la création des algorithmes de fonctionnement.
Grâce au Pack Lego Mindstorms EV3, on donc peut créer le prototype modulaire et programmer le fonctionnement de ce robot.
Exemple en photos d'un prototype réalisé pour expérimentations
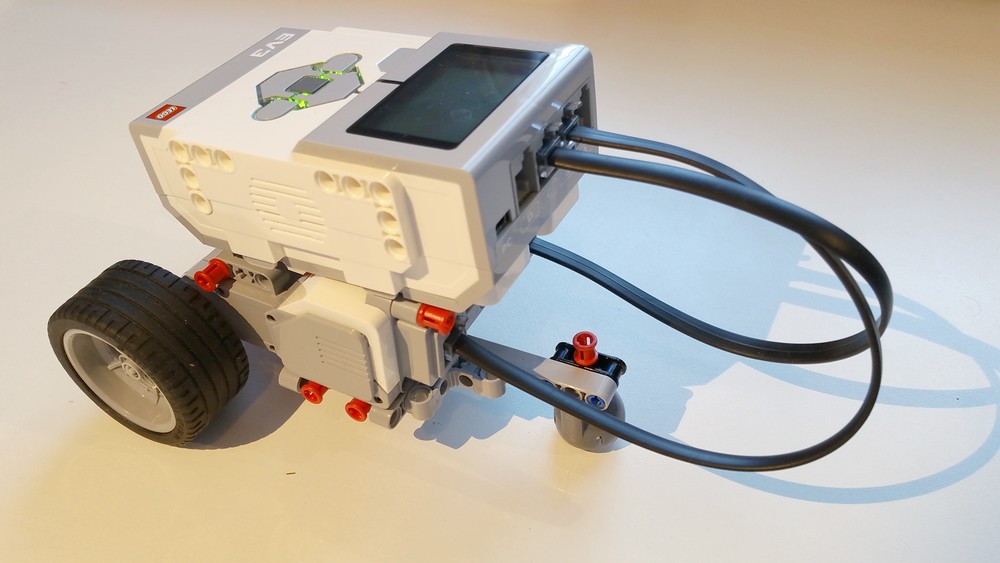
| Base du prototype (Voir sa construction ici) |
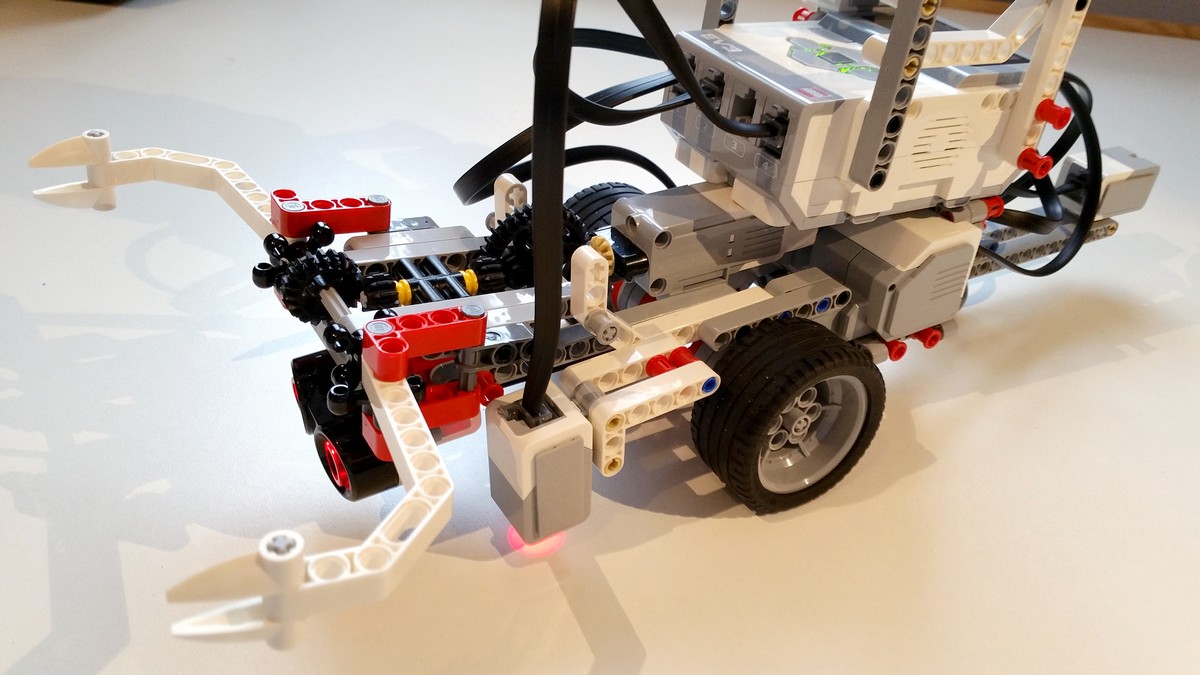
Vue complète du robot d'exploration |
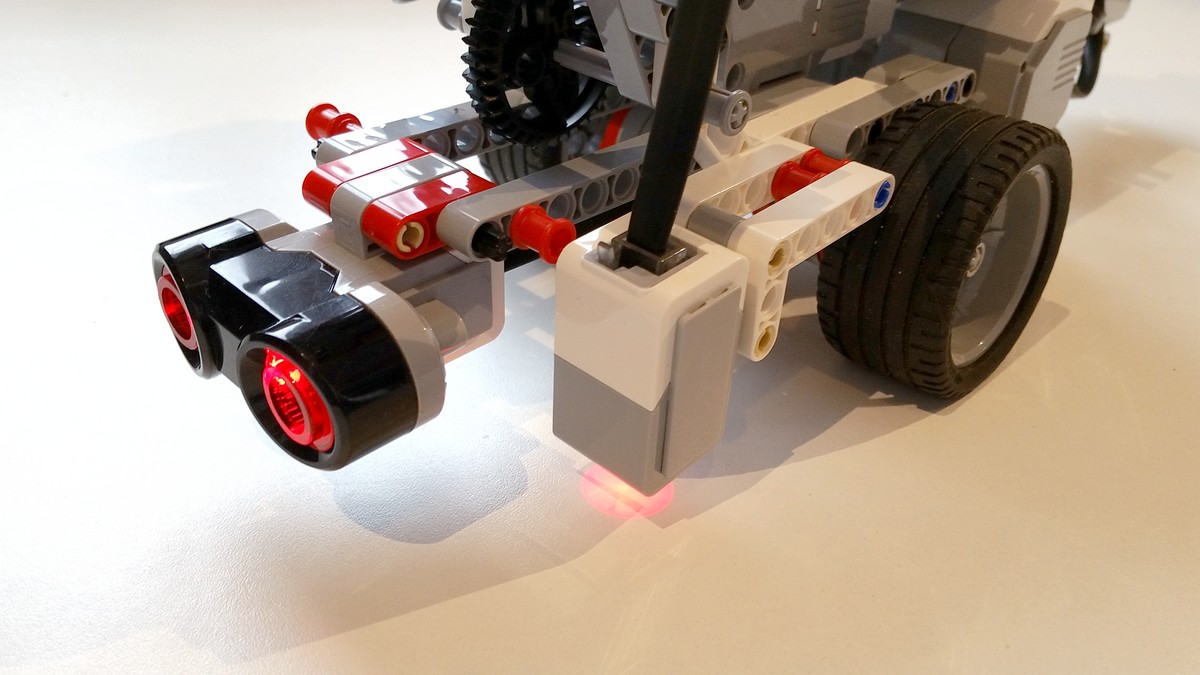
Vue du capteur de distance et couleur |
|
|
|
|
| Vue de la pince ouverte |
Vue de la caméra 360° et caméra grand angle |
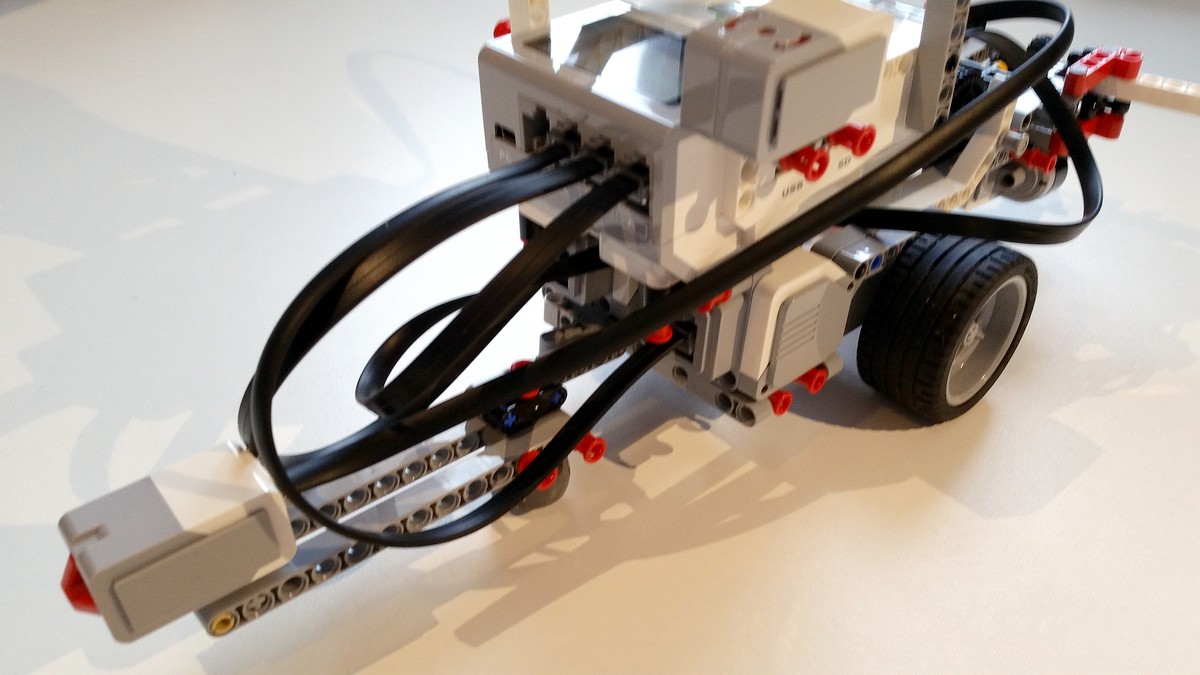
Vue du capteur tactile de recul |
|
|
|
|

Référence au texte officiel et exemples d'exploitations pédagogiques
Exemple de Problème sociétal
La conquête de l'espace n'est qu'à ses débuts, plusieurs planètes du système solaire n'ont pas encore livrées tous leurs secrets, c'est le cas de Mars !
Le projet "Exploration de Mars" permet de développer un robot multifonctions pour explorer davantage Mars et remplir diverses missions.
Ce robot servira à faire progresser les avancées scientifiques et technologiques.
Exemple de vidéo de lancement du problème sociétal
Problème sociétal : "Comment développer et programmer un robot d'exploration de Mars capable de remplir différentes missions ?"
Pistes et exemples d'exploitations pédagogiques
Thème 1 - Design, innovation et créaticité
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
|
DIC-1-Imaginer des solutions en réponse aux besoins, matérialiser une idée en intégrant un dimension design |
|||
DIC-1-1- Identifier un besoin (biens matériels ou services) et énoncer un problème technique ; identifier les conditions, contraintes (normes et règlements) et ressources correspondantes, qualifier et quantifier simplement les performances d’un objet technique existant ou à créer.
|
A quel besoin répond le robot à créer ? Comment définir les différents aspects du robot ? |
Identifier le besoin à partir du cahier des charges Identifier les contraintes associées au projet Analyse du cahier des charges partiel Compléter le cahier des charges partiel en ajoutant des fonctions et caractéristiques |
-Lettre de demande de l'ESA -Cahier des charges partiel |
DIC-1-2 - Imaginer, synthétiser et formaliser une procédure, un protocole.
|
Comment représenter le déroulement du projet ? Comment représenter la procédure de montage du robot de base ? Comment représenter les différentes fonctions de services et solutions du robot ? |
Réaliser un planning du projet avec Gantt Project Réaliser une gamme de réalisation Réaliser une carte mentale des fonctions et solutions prévisibles avec une carte mentale |
Application Gantt Project Exemple de gamme de fabrication Application Freemind Tutoriels d'utilisation |
DIC-1-3 - Participer à l’organisation de projets, la définition des rôles, la planification (se projeter et anticiper) et aux revues de projet.
|
Comment organiser le développement du projet ? |
Définir les rôles des participants du projet collaboratif Planifier la réalisation du projet |
Exemple de planning ou diagramme pert de projet |
DIC-1-4 - Imaginer des solutions pour produire des objets et des éléments de programmes informatiques en réponse au besoin.
|
Comment définir le design général du robot ? Comment identifier l'état de la recherche au niveau de la robotique ? Comment représenter les idées de formes et fonctionnement du robot ? Comment représenter le robot sur Mars ? Comment piloter le robot ? Comment faire fonctionner les caméras wifi ? |
Définir le design du robot autant d'un point de vue fonctionnel qu'esthétique Réaliser une veille technologique sur la robotique Représenter le robot en croquis Réaliser des schémas Analyser des algorithmes de fonctionnement et rédiger ceux du nouveau robot Réaliser une infographie du robot sur Mars en réalité augmentée Identifier le fonctionnement des caméras sans fils et tester leur fonctionnement |
Exemples de robots déjà utilisés pour l'exploration Sites internet sélectionnés sur la veille scientifique et technologique Vidéos et images de robots Logiciels de réalité augmentée Application de photos et vidéo wifi |
DIC-1-5 - Organiser, structurer et stocker des ressources numériques.
|
Comment organiser les fichiers numériques servant au développement du projet ? |
Structurer les espaces de travail dans le réseau internet et online pour chaque ilot Stocker tous les fichiers de travail |
ENT Argos ou Google Drive Postes informatiques en réseau |
|
DIC-1-6 - Présenter à l’oral et à l’aide de supports numériques multimédia des solutions techniques au moment des revues de projet.
|
Comment présenter l'avancement des travaux sur le projet ? |
Réaliser un Prezi ou Padlet ou diaporama du développement du projet pour l'expliquer au cours des revues de projet Respecter une charte graphique Représenter ses idées avec FreeMind |
Applications Prezi, Padlet, Google Slide, Freemind Tutoriels |
|
DIC-2-Réaliser, de manière collaborative, le prototype d’un objet communicant |
|||
DIC-2-1- Réaliser, de manière collaborative, le prototype d’un objet pour valider une solution.
|
Comment expérimenter le fonctionnement des capteurs et actionneurs du robot ? Comment expérimenter le prototype de robot ? |
Expérimenter le fonctionnement de chaque capteur avec la brique programmable EV3 et Scratch Expérimenter les différentes fonctions techniques en réalisant des prototypes partiels (se déplacer, supporter la caméra 360°, pincer un objet ....) |
Cahier des charges Schémas et plans numériques Pack Lego Mindstorms EV3 |
Thème 2 - Les objets techniques, les services et les changements induits dans la société
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
|
OTSCIS-1-Comparer et commenter les évolutions des objets et systèmes |
|||
OTSCIS-1-1- Regrouper des objets en familles et lignées.
|
Comment s'est réalisée l'évolution de la robotique dans le temps ? Comment s'est réalisée la conquête de l'espace ? Pourquoi les robots ont un impact sur la société ? Pourquoi doit-on respecter des règles avec l'usage des robots ou des caméras connectées |
Identifier les différents systèmes robotiques dans le temps et leurs dates Identifier les grandes dates de la conquête spatiale Rechercher les règles d'usage des objets connectés, robots, caméras ... |
Sites internet sélectionnés ou libre Wikipédia |
| OTSCIS-1-2- Relier les évolutions technologiques aux inventions et innovations qui marquent des ruptures dans les solutions techniques. |
Pourquoi ces évolutions ont eu lieu ? Qu'est ce qui différentie les différents systèmes ? |
Identifier les évolutions dans les solutions techniques employées |
sites internet images et vidéos de systèmes robotiques |
| OTSCIS-1-3- Comparer et commenter les évolutions des objets en articulant différents points de vue : fonctionnel, structurel, environnemental, technique, scientifique, social, historique, économique. |
Pourquoi et à grâce à quoi se sont réalisées les évolutions des robots ? |
Identifier les évolutions du point de vue fonctionnel, structurel, environnemental, technique, scientifique, historique, économique |
Sites internet images et vidéos de systèmes robotiques |
OTSCIS-1-4- Élaborer un document qui synthétise ces comparaisons et ces commentaires.
|
Comment représenter les évolutions des robots dans le temps ? |
Réaliser une frise chronologique de l'évolution des robots Réaliser un diaporama ou un Prézi ou une page web pour présenter les recherches de OTSCIS-1-1, 1-2, 1-3 |
Application Frisechrono Applications diaporama, Prézi Site web en ligne |
| OTSCIS-2-Exprimer sa pensée à l’aide d’outils de description adaptés | |||
OTSCIS-2-1- Exprimer sa pensée à l’aide d’outils de description adaptés : croquis, schémas, graphes, diagrammes, tableaux.
|
Comment représenter des objets techniques ou ses idées et les décrire ? |
Réaliser des croquis d'un robot particulier Réaliser des schémas de fonctionnement des fonctions techniques d'un robot Représenter les solutions utilisées pour le fonctionnement d'un robot avec une carte mentale Représenter l'algorithme de fonctionnement d'un robot |
Images et vidéos de robots Logiciel de schématisation et d'algorigramme Application FreeMind Logiciel Scratch |
OTSCIS-2-2- Lire, utiliser et produire, à l’aide d’outils de représentation numérique, des choix de solutions sous forme de dessins ou de schémas.
|
Comment représenter numériquement la structure d'un robot Lego Mindstorms ? Comment décrire le fonctionnement d'une fonction technique du robot ? |
Réaliser ou modifier la structure du robot Légo Mindstorms en numérique Réaliser un programme de pilotage d'une fonction du robot avec Scratch |
Logiciel Lego Digital Designer Scratch |
Thème 3 - La modélisation et la simulation des objets et systèmes techniques
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
|
MSOST-1-Analyser le fonctionnement et la structure d’un objet |
|||
MSOST-1-1- Respecter une procédure de travail garantissant un résultat en respectant les règles de sécurité et d’utilisation des outils mis à disposition.
|
Comment mettre en fonctionnement le robot avec l'application de programmation Scratch ? Comment fabriquer le robot multifonction imaginé ? Comment définir les commandes de pilotage du robot ? Comment expérimenter le fonctionnement de chaque actionneur et capteur ? |
Réalisation la communication entre le robot et Scratch en suivant une procédure Réaliser l'assemblage du robot multifonction Déterminer les commandes du robot pour que ce soit ergonomique à utiliser Définir un protocole d'expérimentation |
Procédure Poste informatique en réseau et bluetooth Brique programmable EV3 Pack Lego Mindstorms EV3 Clavier ordinateur Exemple de protocole d'expérimentation |
MSOST-1-2- Associer des solutions techniques à des fonctions.
|
Comment définir les fonctions techniques du robot ? Comment définir les solutions techniques du robot ? |
A partir du cahier des charges, rechercher les fonctions techniques du robot Rechercher les solutions techniques pertinentes en regard des fonctions techniques |
cahier des charges Exemples de systèmes robotiques Tutoriel de recherche des fonctions techniques et solutions techniques à partir du cdc |
MSOST-1-3- Analyser le fonctionnement et la structure d’un objet, identifier les entrées et sorties.
|
Comment devra fonctionner le robot ? Comment structurer le robot pour son fonctionnement ? Comment devra circuler l'énergie pour le fonctionnement du robot ? Comment circuleront les informations pour le fonctionnement du robot ? |
Analyser, identifier et représenter la chaine d'énergie Analyser, identifier et représenter la chaine d'nformation Identifier la structure générale de fonctionnement et le rôle de chaque composant |
Liste des fonctions de la chaine d'information et chaine d'énergie Exemple de chaine d'information et d'énergie |
MSOST-1-4- Identifier le(s) matériaux, les flux d'énergie et d'information sur un objet, et décrire les transformations qui s'opèrent.
|
Comment choisir les matériaux du robot pour l'exploration de Mars ? Comment alimenter en énergie le robot d'exploration ? Comment les sources d'énergies employées seront transformées ? |
Même si le prototype sera réalisé en Légo, identifier les matériaux les plus adaptés aux conditions de la mission Mars Même si le prototype sera réalisé en Légo, identifier les énergies les plus appropriées pour alimenter le robot sur Mars Identifier les transformations des sources d'énergie |
Liste de matériaux et caractéristiques Conditions physiques de l'espace et du sol martien Sites internet choisis sur les sources d'énergies et utilisations |
MSOST-1-5- Décrire, en utilisant les outils et langages de descriptions adaptés, le fonctionnement, la structure et le comportement des objets.
|
Comment décrire la structure du robot ? Comment décrire le fonctionnement du robot ? Comment décrire le comportement du robot ? |
Représenter (ou modifier à partir d'une base de véhicule roulant) le projet de robot multifonctions avec un logiciel de représentation numérique Représenter les algorithmes de fonctionnement du robot multifonctions Réaliser la simulation du fonctionnement de chaque fonction technique du robot avec le logiciel Scratch |
Lego Digital Designer Logiciel Scratch |
|
MSOST-1-6- Mesurer des grandeurs de manière directe ou indirecte.
|
Comment fonctionne un capteur, un codeur, un détecteur ? Comment fonctionnent les actionneurs (moteurs) ? Comment mesurer le fonctionnement des capteurs et actionneurs du robot multifonction ? |
Expérimenter le fonctionnement de chaque actionneur et chaque capteur seul et réaliser une fiche technique précisant chaque principe technique, la nature du signal et la nature de l'information fournis ou reçus Utilisation des divers instruments de mesure pour observer et comprendre le fonctionnement des capteurs et actionneurs |
Capteurs de Mindstorms Actionneurs de Mindstorms Logiciel Scratch pour expérimentation Instruments de mesure, réglet, compas, rapporteur ... |
|
MSOST-1-7- Interpréter des résultats expérimentaux, en tirer une conclusion et la communiquer en argumentant.
|
Comment se comporte le fonctionnement du robot par rapport au cahier des charges et ses diverses missions ? | A partir des expérimentations du prototype final, observer les écarts entre ce qui est attendu et les résultats de l'expérimentation. |
Cahier des charges Prototype final en fonctionnement |
|
MSOST-2-Utiliser une modélisation et simuler le comportement d’un objet |
|||
|
MSOST-2-1- Utiliser une modélisation pour comprendre, formaliser, partager, construire, investiguer, prouver.
|
Comment décrire la structure du robot ? Comment décrire le fonctionnement du robot ? Comment décrire le comportement du robot ? |
Représenter (ou modifier à partir d'une base de véhicule roulant) le projet de robot multifonctions avec un logiciel de représentation numérique Représenter les algorithmes de fonctionnement du robot multifonctions Réaliser la simulation du fonctionnement de chaque fonction technique du robot avec le logiciel Scratch |
Lego Digital Designer Logiciel Scratch |
|
MSOST-2-2- Simuler numériquement la structure et/ ou le comportement d’un objet. Interpréter le comportement de l'objet technique et le communiquer en argumentant.
|
En simulation, comment se comporte le fonctionnement du robot par rapport au cahier des charges et ses diverses missions ? | A partir des simulations numériques des algorithmes avec Scratch, observer les écarts entre ce qui est attendu et les résultats de la simulation. |
Cahier des charges Simulation du fonctionnement des algorithmes avec Scratch |
Thème 4 - Informatique et programmation
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
|
IP-1-Comprendre le fonctionnement d’un réseau informatique |
|||
|
Comment utiliser un ordinateur en réseau pour travailler ? Comment stocker les fichiers et les programmes ? Comment utiliser des logiciels comme Scratch pour programmer ? Comment mettre en fonctionnement des objets connectés ? |
Utiliser l'environnement numérique de travail pour créer, modéliser, programmer, élaborer des documents Stocker les fichiers de travail dans l'emplacement prévu du réseau Utiliser des logiciels pour réaliser des présentations, de Utiliser le logiciel Scratch pour programmer le fonctionnement du véhicule Utiliser internet pour effectuer des recherches et en comprendre le fonctionnement Partager des informations et données dans internet |
Ilot avec plusieurs postes informatiques Connexion bluetooth, wifi Logiciels de bureautique et de présentation assistée par ordinateur Logiciel Scratch Pack Lego Mindstorms EV3 Logiciel Lego Digital Designer Caméra sans fil (Wifi) |
| IP-2-Ecrire, mettre au point et exécuter un programme | |||
| IP-2-1- Analyser le comportement attendu d’un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. |
Comment analyser le comportement et les programmes d'un système réel ? Comment définir le fonctionnement d'un robot ? Pourquoi un robot est un système embarqué ? Comment écrire, mettre au point et exécuter les programmes commandant un système réel ? Comment écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs ? Comment réaliser les différentes missions prévues dans le cahier des charges ? |
Analyser et définir l'algorithme de fonctionnement d'un robot mobile à partir de l'observation de son fonctionnement Etablir la communication avec l'interface programmable EV3 Définir les caractéristiques d'un système embarqué Identifier les formes et transmissions des signaux reçus ou envoyés pour le fonctionnement des actionneurs et des capteurs Réaliser et tester un algorithme avec Scratch pour télécommander les mouvements du robot avec les actionneurs Mettre au point et tester le programme de rotation des roues du robot en adaptant les variables de vitesse et d'angle de rotation des moteurs. Réaliser et tester des instructions conditionnelles pour télécommander le robot, manipuler la pince Réaliser et tester des séquences d'instructions pour détecter un obstacle, détecter une couleur Réaliser des boucles pour suivre une ligne, circuler automatiquement |
Robot minimaliste pour l'analyse Cahier des charges du robot multifonctions à mettre en fonctionnement Ensemble du Pack Lego Mindstorms EV3 avec la brique programmable, les capteurs et les actionneurs Prototype de robot complet à programmer avec tous les capteurs et actionneurs prévus dans le cahier des charges |
| IP-2-2- Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | |||
IP-2-3- Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs.
|
|||
Algorithmes de fonctionnement à partir du cahier des charges
Extraits du cahier des charges "Robot d'exploration de Mars" :
Le robot doit être capable de remplir les missions suivantes :
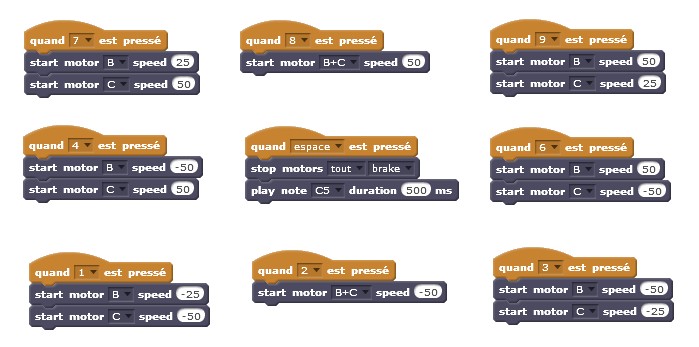
- Se déplacer dans 8 directions en étant télécommandé par un clavier numérique d'ordinateur.
- Pour le pilotage, afficher et enregistrer des images sur un écran de tablette à distance grâce à une caméra grand angle wifi.
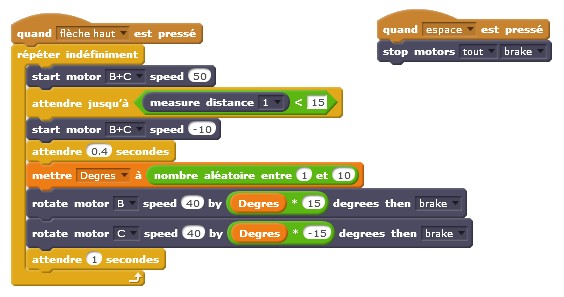
- Se déplacer automatiquement. Le robot contournera les obstacles.
- Afficher et enregistrer des images de l'exploration sur un écran de tablette à distance grâce à une caméra 360° wifi.
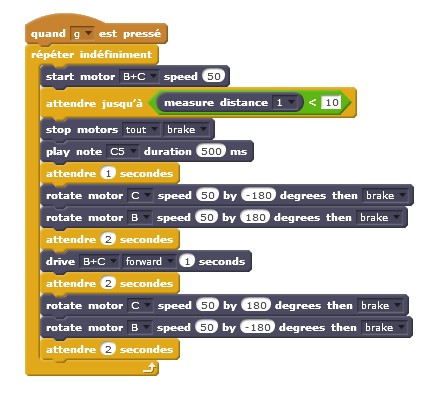
- Lors de l'exploration, détecter la présence d'eau.
- Lors de l'exploration, saisir une petite roche ou ramasser de la poussière du sol pour analyse ultérieure.
- Lors de ses déplacements, le robot devra détecter les obstacles à l'arrière en cas de recul.
- ...
|
Algorithme "Déplacer dans 8 directions"
|
Vidéo du fonctionnement |
|
Algorithme "Contourner les obstacles"
|
Vidéo du fonctionnement |
|
Algorithme "Détecter de l'eau"
|
Vidéo du fonctionnement |

|
Algorithme "Saisir une petite roche"
|
Vidéo du fonctionnement |

|
Algorithme "Circuler automatiquement"
|
Vidéo du fonctionnement |
|
Algorithme "Détecter un obstacle"
|
Vidéo du fonctionnement |
