Projet "Robot d'exploration télécommandé"
Le projet "Robot d'exploration télécommandé"
|
Cliquer sur les images pour agrandir |
Le projet "Robot d'exploration télécommandé" est à destination des 6ème et permet de travailler différentes compétences du CYCLE 3.
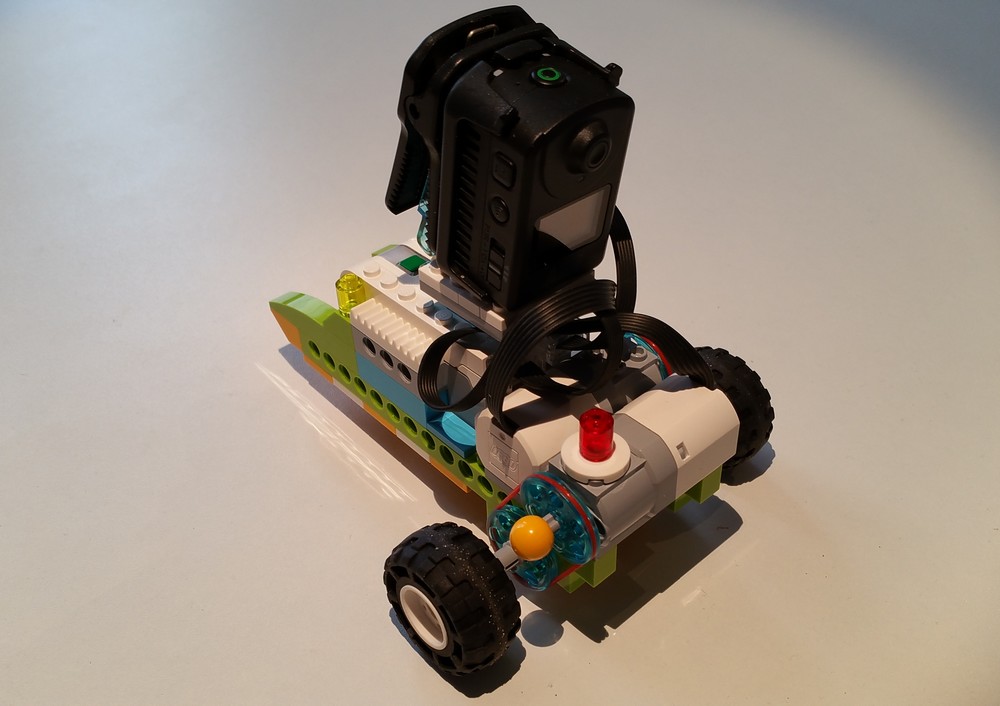
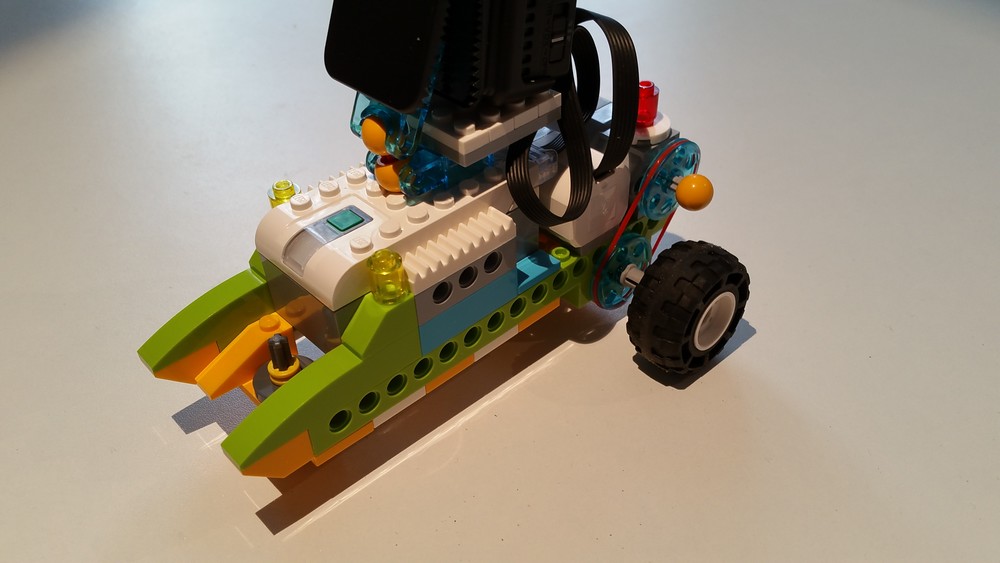
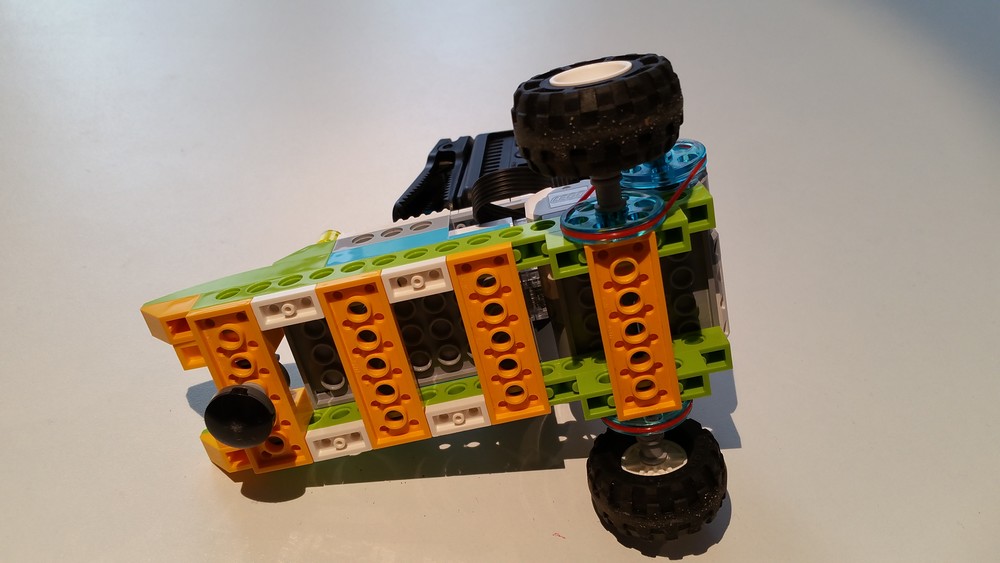
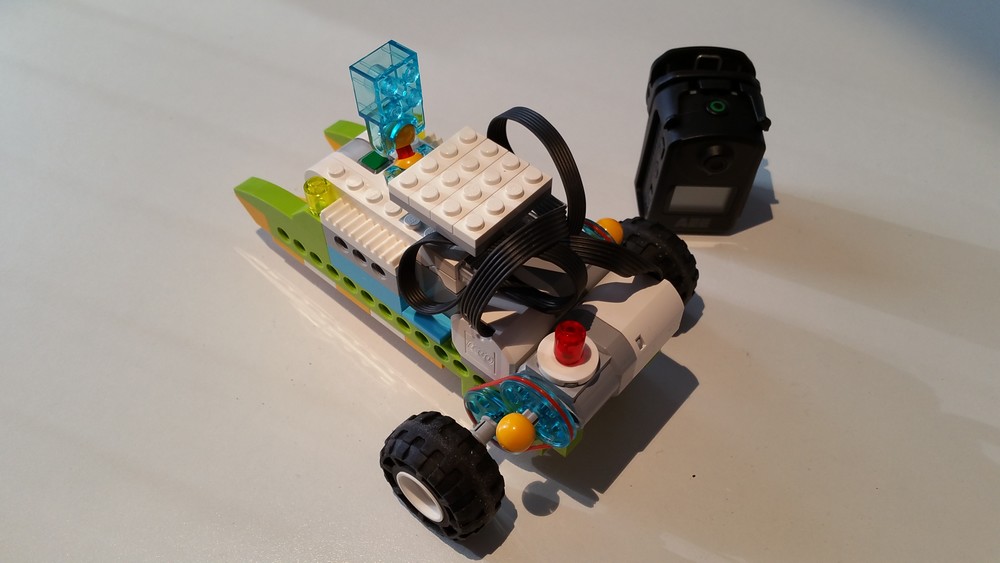
Le projet consisterait à imaginer et réaliser un prototype d'un robot télécommandé avec une caméra sans fil pour explorer et filmer l'exploration. Un cahier des charges du robot préciserait les fonctions et caractéristiques pour la conception du robot, les algorithmes de pilotage du robot attendus.
Grâce au Pack Lego WeDo 2.0, on donc peut créer le prototype, programmer le fonctionnement de la voiture de course. |
Référence au texte officiel et exemples d'exploitations pédagogiques
Exemple de Problème sociétal
Les robots servent à aider l'homme dans des tâches difficiles d'accès comme pour des inspections de conduits par exemple.
Le projet robot d'exploration télécommandé permet de développer un véhicule piloté à distance avec une caméra sans fil fixée dessus pour renvoyer des images de ses déplacements.
"Comment développer un robot d'exploration permettant de filmer ses déplacements ?"
Exemples d'exploitations pédagogiques
Thème 1 - Matière, mouvement, énergie, information
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
MMEI-3- Identifier différentes sources d'énergies et connaître quelques conversions d'énergie
|
Grâce à quelles énergies fonctionne le véhicule et comment elles se transforment ? | Identifier les énergies utilisées et ses différentes formes en observant des robots d'exploration |
-Cahier des charges -Images ou vidéos de robots |
MMEI-3 - Reconnaître les situations où l'énergie est stockée, transformée, utilisée.
|
Comment est transmise l'énergie des batteries aux roues ? |
Observer le véhicule de base et identifier les composants de la chaine d'énergie Classer les composants suivant leurs fonctions |
Exemple de vidéo d'un robot en fonctionnement Prototype de base en fonctionnement Exemple chaine d'énergie |
MMEI-4 - Identifier un signal et une information
|
Comment le véhicule indique ses divers déplacement ? Comment communique le robot et la caméra sans fil ? |
Identifier les signaux et information que doit fournir le véhicule au lancement de la course |
Cahier des charges Camera et telephone Interface programmable |
Thème 3 - Matériaux et objets techniques
| Eléments du programme | Problèmes technologiques | Activités élèves | Ressources |
MOT-1- Repérer les évolutions d'un objet dans différents contextes (historique, économique, culturel)
|
Comment s'est effectuée l'évolution des robots dans le temps ? Pourquoi a-t-on inventé les robots ? |
-Rechercher les évolutions marquantes des robots dans l'histoire -Identifier les raisons qui ont fait évoluer les robots |
-Sélection de sites internet sur le thème |
MOT-2- Décrire le fonctionnement d'objets techniques, leurs fonctions et leurs constitutions
|
A quoi sert l'objet technique ? Comment doit fonctionner l'objet technique ? Comment devra être le design de l'objet technique ? Comment réaliser les transmissions permettant les divers mouvements du robot ? Comment fixer la caméra sans fil sur le robot ? |
-Identifier le besoin, les fonctions à assurer et les choix esthétiques du véhicule à réaliser -Rechercher des solutions techniques -Décrire graphiquement les fonctions techniques et solutions techniques - Expérimenter plusieurs mécanismes de transmission (courroie, engrenages ...) - Tester et comparer plusieurs systèmes de fixation de la caméra |
-Cahier des charges -Ressources photos et vidéos sur des robots et transmissions de mouvement |
MOT-4 - Concevoir et produire tout ou partie d'un objet technique en équipe pour traduire une solution technologique répondant à un besoin
|
Comment respecter exactement le cahier des charges ? Comment représenter les idées du véhicule à créer ? Comment représenter la maquette numérique du véhicule ? Comment organiser la réalisation du véhicule ? Comment fabriquer le prototype ? Comment vérifier que le prototype respecte le cahier des charges ? |
-Repérer les contraintes à respecter dans le fonctionnement du robot -Représenter avec un croquis la forme du véhicule, le système de fixation de la caméra - Représenter un schéma des transmissions de mouvement, représenter le schéma des mouvements de la caméra. -Démonter numériquement ou modifier la maquette numérique du véhicule - Réaliser la procédure de montage et de mise en fonctionnement du véhicule - Réaliser la notice du processus de communication entre la brique programmable et l'ordinateur -Programmer tous les mouvements du robot -Tester le fonctionnement du véhicule à partir de ses programmes |
-Cahier des charges -Composants Lego WeDo 2.0 avec interface programmable, capteurs et actionneurs -Caméra sans fil, logiciel dédié et téléphone portable -Maquette numérique du véhicule Légo de base -Logiciel Lego Digital Designer -Exemple de planning ou processus -Piste d'essai avec des Kapla |
MOT-5 - Repérer et comprendre la communication et la gestion de l'information
|
Comment utiliser un ordinateur en réseau pour travailler ? Comment stocker les données des programmes ? Comment utiliser le logiciel Scratch pour programmer ? Comment expliquer le fonctionnement du véhicule ? Comment connecter le véhicule ? |
-Utiliser l'environnement numérique de travail pour créer, modéliser, programmer, faire des rapports -Stocker les fichiers de travail dans l'emplacement prévu du réseau - Déterminer les algorithmes des différents mouvements attendus -Utiliser le logiciel Scratch pour programmer le fonctionnement du véhicule |
-Ilot avec plusieurs postes informatiques -Connexion bluetooth - Logiciel Scratch - Logiciel Légo Digital Designer - Caméra sans fil |
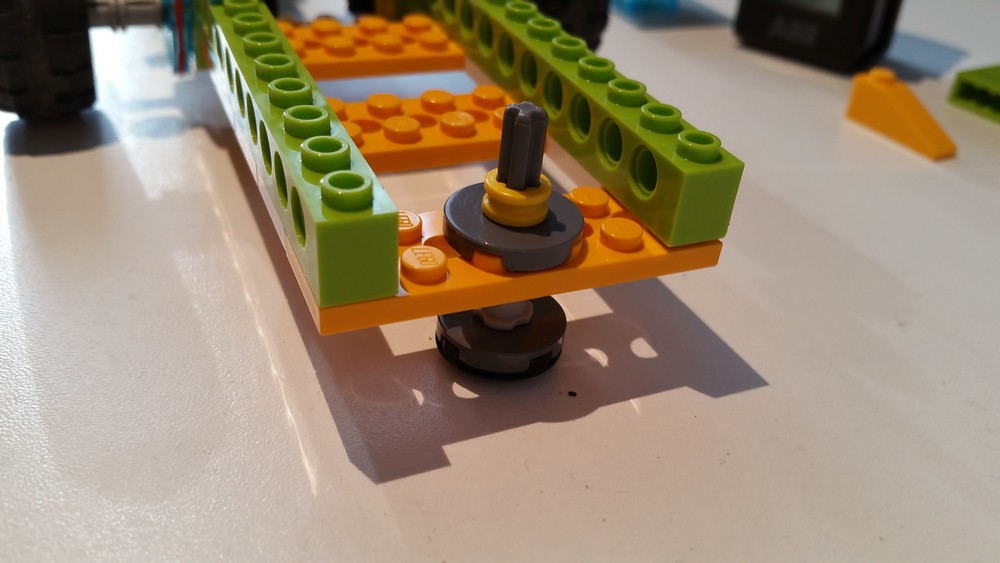
Exemple de prototype réalisé pour expérimentations


Algorithme de fonctionnement à partir du cahier des charges
Algorithmes à déterminer du Cahier des charges du robot d'exploration :
Le robot doit pouvoir se déplacer grâce au 9 touches du pavé numérique d'un ordinateur :
|
Touche 8 : avancer Touche espace ou 0 : Arrêt de tous les moteurs du robot |
Touche 7 : avancer et tourner à gauche en même temps Touche 9 : avancer et tourner à droite en même temps Touche 1 : reculer et tourner à gauche en même temps Touche 3 : reculer et tourner à droite en même temps |
|
Algorithme à partir de Scratch 2 :
|

NB : Algorithme non réalisable avec l'application constructeur Lego WeDo car les programmes doivent gérer 2 moteurs et un seul moteur est prévu dans l'application