Commandes de base
Assemblage préalable d'un robot
Réalisation d'un robot comportant un moteur pour entrainer les roues
Algorithmes pour actionner un moteur et mettre en mouvement un véhicule
| avec l'Application Lego WeDo | avec Scratch 2 |
|
Faire tourner le moteur dans un sens horaire :
Faire tourner le moteur dans le sens anti-horaire :
Faire tourner le moteur pendant 1s et s'arrêter :
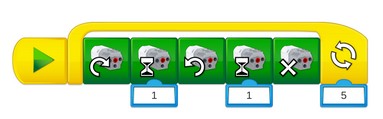
Faire tourner le moteur dans un sens puis l'inverse, répété en boucle de 5 fois :
|
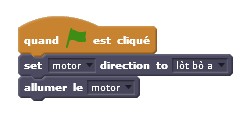
Faire tourner le moteur dans un sens horaire :
Faire tourner le moteur dans le sens anti-horaire :
Faire tourner le moteur pendant 1s et s'arrêter :
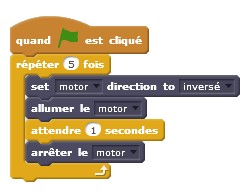
Faire tourner le moteur dans un sens puis l'inverse, répété en boucle 5 fois :
|
|
En pilotage |
|





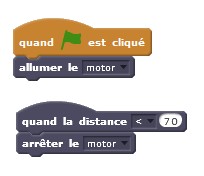
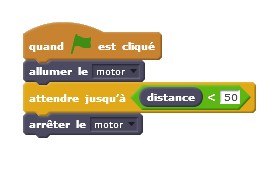
Algorithmes pour utiliser un capteur de distance
| avec l'Application Lego WeDo | avec Scratch 2 |
|
Faire tourner le moteur jusqu'à détecter un obstacle :
|
Faire tourner le moteur jusqu'à détecter un obstacle : Méthode 1 :
Méthode 2 :
|
|
En pilotage |
|

Algorithmes pour émettre des signaux lumineux et sonores
| avec l'Application Lego WeDo | avec Scratch 2 |
|
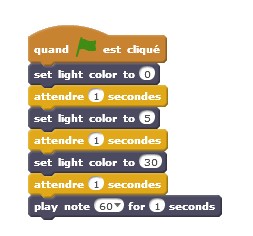
Afficher une lumière rouge, orange, verte, puis un son :
|
Afficher une lumière rouge, orange, verte, puis un son :
|
|
En pilotage |
|