S'arrêter devant obstacle

Thymio avance en ligne droite et s'arrête devant un obstacle
L'algorithme
Thymio avance tout droit jusqu'à ce qu'il détecte quelque chose devant lui.
En simulation
NB : le trait rouge symbolise le signal infrarouge émis par le capteur central du robot.
En pilotage
Voici trois possibilités de script réalisé avec le VPL Blockly pour Thymio d'Aseba.
Script 1:
Ici, nous utilisons deux événements séparés :
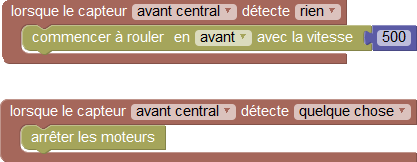
Dans les deux scripts suivants, nous utilisons un événement et une boucle.
Script 2 :
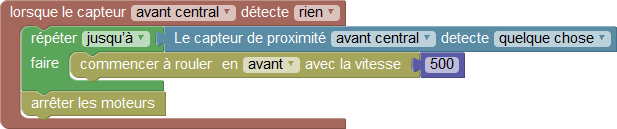
Explication :
| Le capteur central avant central ne détecte rien, les instructions suivantes s'exécutent : | |||
| Jusqu'à ce que Le capteur avant central détecte quelque chose, les instructions suivantes s'exécutent en boucle : | |||
| aller tout droit | |||
| Sinon | arrêter moteur | ||
Script 3 :
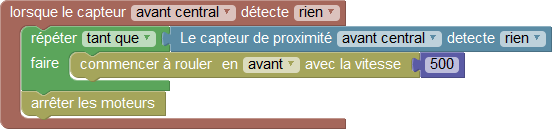
Explication :
| Le capteur central avant central ne détecte rien, les instructions suivantes s'exécutent : | |||
| Tant que Le capteur avant central ne détecte rien, les instructions suivantes s'exécutent en boucle : | |||
| aller tout droit | |||
| Sinon | arrêter moteur | ||